
Dongkyu Lee
CTO & Co-Founder at URobotics Corp.
dklee [at] urobotics [dot] ai
I am CTO and Co-Founder at URobotics Corp., a startup developing autonomous navigation software for legged robots. I am also a Ph.D. candidate in the Department of Electrical Engineering at KAIST, member of the Urban Robotics Lab led by Prof. Hyun Myung. My research focuses on autonomous navigation for legged robots — path planning, decision-making, and long-term field robotics.
Education
News
- Feb. 2026 DreamFlow accepted to ICRA 2026!
- Dec. 2025 DreamWaQ++ accepted to IEEE T-RO 2025!
- Oct. 2025 Presented a paper on humanoid locomotion at IEEE Humanoids Workshop 2025!
- Jul. 2025 TRG-planner presented as an IROS 2025 Oral!
- Apr. 2025 Co-founded URobotics Corp. as CTO!
Research Experience

CTO and Co-Founder
URobotics Corp., South Korea
Mobility Intelligence Team & Robot System Team
Apr. 2025 – Present


Research Intern
ETRI, South Korea
AI Research Team
Jan. 2021 – Feb. 2021

Research Intern
MSIT, South Korea
Software Maestro 11th
Jun. 2020 – Dec. 2020
Research Highlights


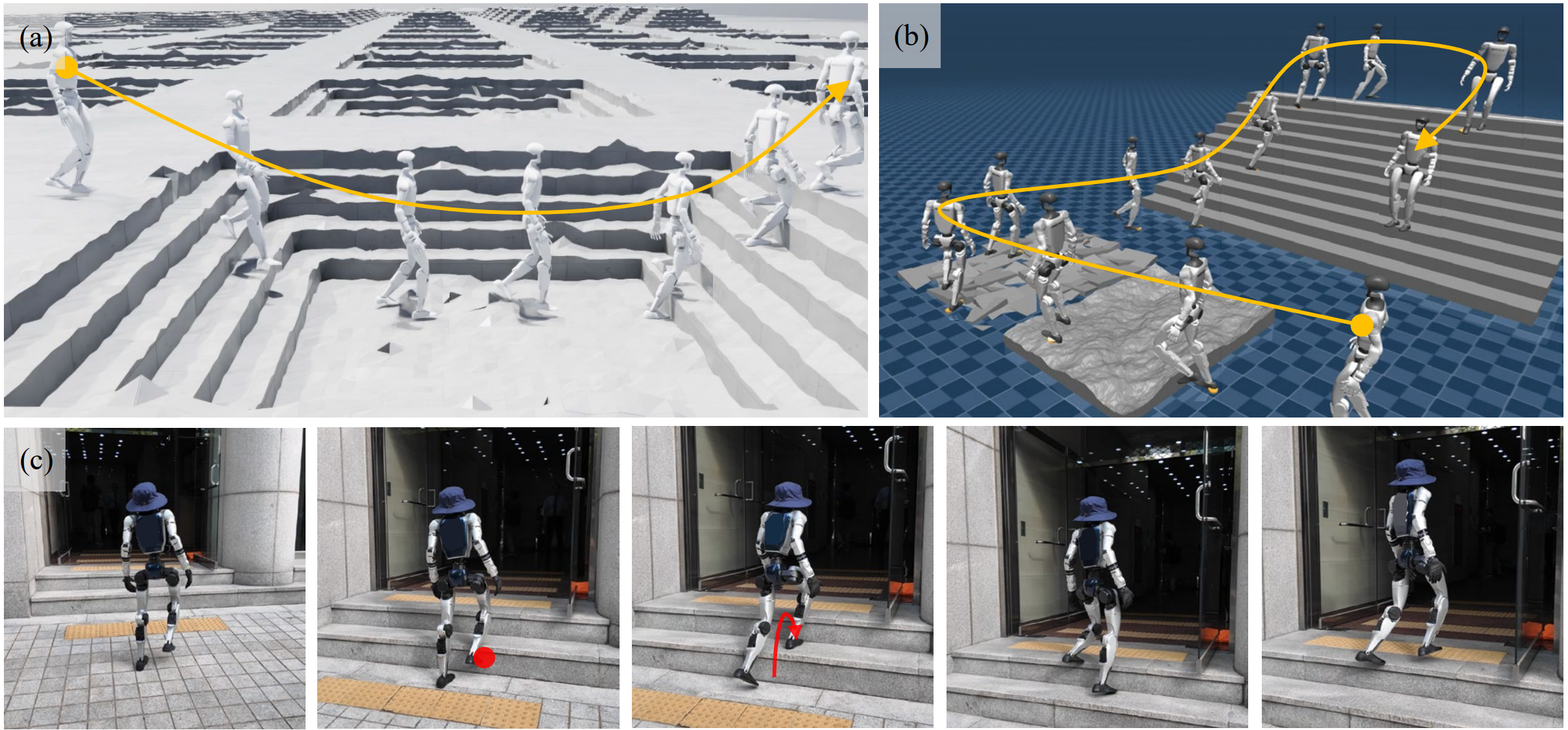
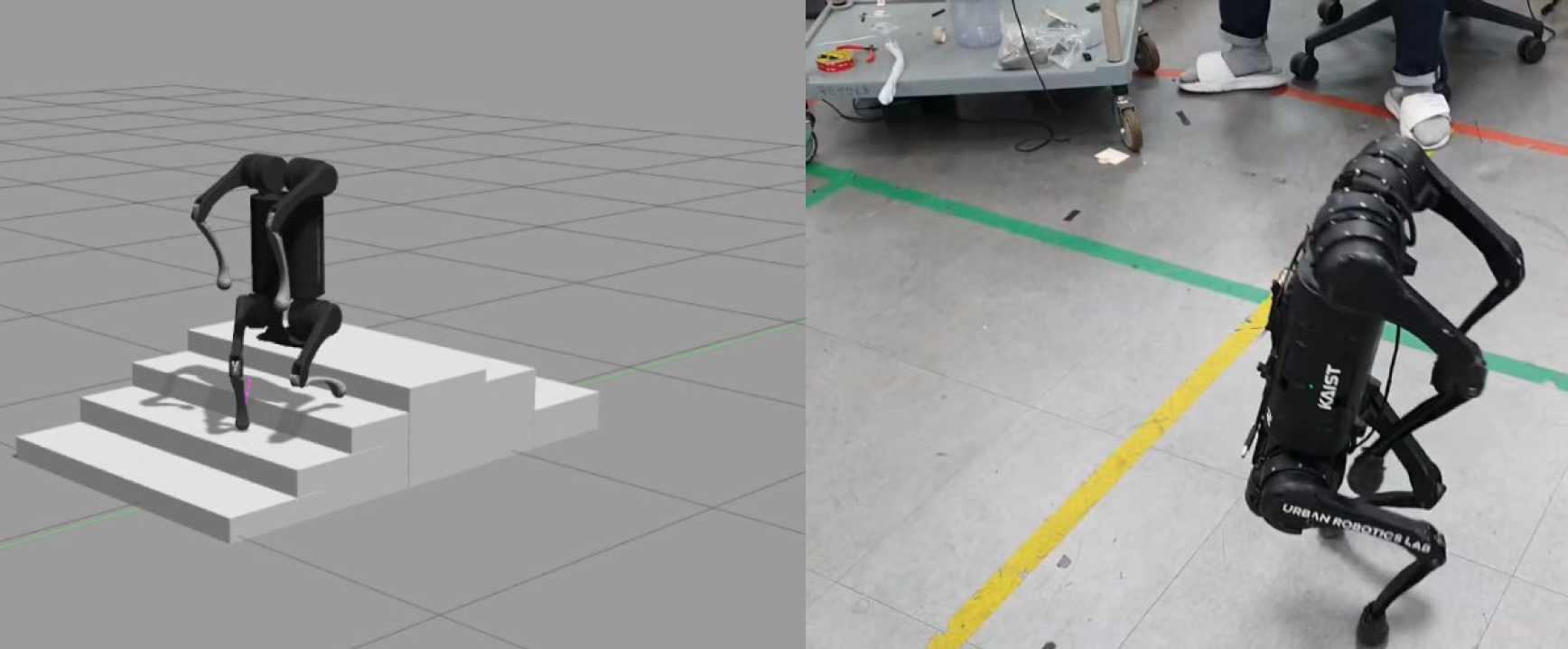
Learning Resilent Blind Locomotion Controller for Humanoid Robots using Deep Reinforcement Learning
Seunghyun Lee, Dongkyu Lee, Byeongho Yu, I Made Aswin Nahrendra, and Hyun Myung


LocoVLM: Grounding Vision and Language for Adapting Versatile Legged Locomotion Policies
I Made Aswin Nahrendra, Seunghyun Lee, Dongkyu Lee, and Hyun Myung
Awards & Honors


Other Publications
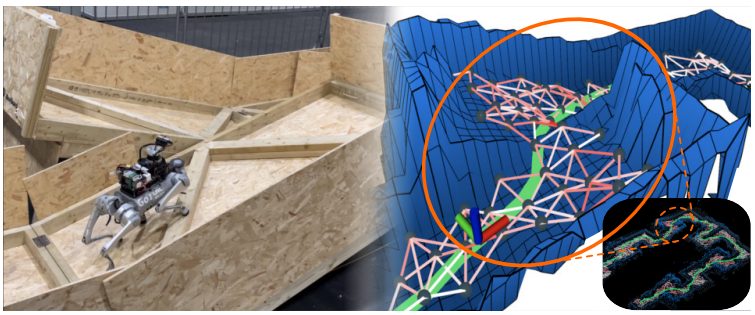
TRIP: Terrain Traversability Mapping with Risk-Aware Prediction for Enhanced Online Quadrupedal Robot Navigation
Minho Oh, Byeongho Yu, I Made Aswin Nahrendra, Seoyeon Jang, Hyeonwoo Lee, Dongkyu Lee, Seungjae Lee, Yeeun Kim, Marsim Kevin Christiansen, Hyungtae Lim, and Hyun Myung
arXiv, 2024 · [Paper]
B-TMS: Bayesian Traversable Terrain Modeling and Segmentation Across 3D LiDAR Scans and Maps for Enhanced Off-Road Navigation
Minho Oh, Gunhee Shin, Seoyeon Jang, Seungjae Lee, Dongkyu Lee, Wonho Song, Byeongho Yu, Hyungtae Lim, Jaeyoung Lee, and Hyun Myung
IEEE Intelligent Vehicles Symposium (IV), 2024 · [Paper]
FARO-Tracker: Fast and Robust Target Tracking System for UAVs in Urban Environment
Dongkyu Lee, EungChang Mason Lee, Hyungtae Lim, Seungwon Song, and Hyun Myung
International Conference on Robot Intelligence Technology and Applications (RiTA), 2022 · [Paper]
CEO-MLCPP: Control-Efficient and Obstacle-Aware Multi-Layer Coverage Path Planner for 3D Reconstruction with UAVs
Eungchang Mason Lee, Sungwook Jung, Seungwon Song, Duckyu Choi, Dongkyu Lee, Seunghyun Lee, Seoktae Kim, and Hyun Myung
International Conference on Robot Intelligence Technology and Applications (RiTA), 2022 · [Paper]
M-BRIC: Design of Mass-Driven Bi-Rotor with RL-Based Intelligent Controller
Dongkyu Lee, EungChang Mason Lee, Duckyu Choi, Junho Choi, Christian Tirtawardhana, and Hyun Myung
International Conference on Ubiquitous Robots (UR), 2022 · [Paper]
Academic Services
Reviewer
- IEEE Robotics and Automation Letters (RA-L) 2026
- IEEE Transactions on Automation Science and Engineering (T-ASE) 2025
- IEEE Transactions on Field Robotics (T-FR) 2025